ACFM® MagCrawler™
Challenge
On behalf of Stinger Technology AS, TSC Subsea were contracted to carry out a subsea, remotely- deployed Alternating Current Field Measurement (ACFM®) inspection at Repsol’s YME platform YME, located in the Egersund basin area in the central North Sea. The inspection of brace to leg and brace to caisson connection welds was to determine the presence or absence of surface breaking defects. All welds were located subsea.
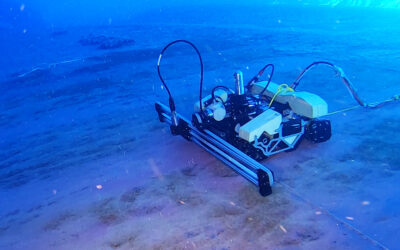
The inspection posed a number of challenges, which required a new and innovative approach to carrying out this type of inspection. Typically, TSC Subsea’s tooling, the ACFM® MagCrawler™ is deployed by work class type ROV, however for this inspection, Stinger’s mini ARROV system was used to deploy the MagCrawler™ to and from the inspection locations. This meant that the MagCrawler™ had to be adapted so that it could be deployed by the mini ROV.
Solution
Repsol is a long-standing client of TSC Subsea, and TSC Subsea has carried out inspections of YME since 2013, developing innovative solutions to solve the client’s inspection requirements.
Stinger is a new client for TSC Subsea but we identified a lot of commonalities in our approach to developing engineering solutions and worked closely together on this project. Both the Stinger ROV and the MagCrawler™ had to be significantly re-engineered to enable this operation. The MagCrawler’s™ weight in water was reduced to about 1kg to enable the mini ROV to carry the load. The ACFM® and MagCrawler’s™ control bottles were integrated into the mini ROV, which almost doubled its original size. A remotely controlled hook was designed and built for the Stinger ROV.
All inspection areas were cleaned with high pressure water jet prior to the ACFM® inspection. The ROV with the MagCrawler™ held in its jaw, was lowered from deck to sea level by crane. The MagCrawler™ was then successfully delivered to the inspection area by the ROV. The vast majority of the welds were inspected using ACFM® U31RD™ equipment and a type 542 or 543 array probe, deployed by the MagCrawler™. The successful completion of both the cleaning and ACFM® inspection of approximately 90% of the Scope of Work (SOW) marked a major step forward in remotely deployed ACFM® inspection using small ROVs.
Result
This was the first time TSC Subsea’s ACFM® MagCrawler™ had been integrated with, and successfully deployed by, a mini ARROV of this size. This demonstrates that the ACFM® can be deployed by mini ROV, (Stinger mini RROV, VideoRay Defender) and can carry out high quality ACFM® inspections due to precise control. This makes it ideal for splash zone inspections to 100m depth.
The switch to a deck-launched ROV’s to carry out the operation meant a significant reduction in personnel and costs compared to a vessel- deployed WROV inspection. On-site personnel were further reduced by operating with remote ACFM® inspectors based in the UK, and the inspection team and ROV pilots, operating remotely from Stinger offices in Stavanger. Ultimately, only two technicians, one supplied by TSC Subsea and the other by Stinger, were required on location for each 12-hour shift to ensure all tooling remained operational and to carry out launch and recovery.
The combination of deck-launched mini-ROV to deploy TSC Subsea’s tooling and an inspection and ROV team that was operating remotely, made the whole operation significantly more efficient and ultimately saved the client significant costs and rig-bedspace.